Sumber: Swarm intelligence: craziness particle swarm optimiztion untuk optimasi sistem tenaga listrik (2023)
sumber : Guha, D., Roy, P. K., & Banerjee, S. (2016). Load frequency control of interconnected power system using grey wolf optimization. Swarm and Evolutionary computation, 27, 97-115.
Sumber : GARG, Kapil; KAUR, Jaspreet. Particle swarm optimization based automatic generation control of two area interconnected power system. International Journal of Scientific and Research Publications, 2014, 4.1: 1-8.
BAB V & VI
PSO Untuk optimasi PSS: CRPSO untuk Optimasi PID-PSS pada Sistem Sulselbar
1. Pengenalan CRPSO (Chaotic Random Particle Swarm Optimization)
a. Particle Swarm Optimization (PSO)
Dalam PSO, setiap partikel merepresentasikan solusi potensial, bergerak dalam ruang pencarian berdasarkan kecepatan dan posisi yang diperbarui secara dinamis untuk mencari solusi terbaik.
Namun, PSO standar sering kali mengalami:
- Konvergensi dini (Premature Convergence) → Terjebak pada solusi lokal.
- Kurangnya eksplorasi global → Terbatasnya kemampuan menjelajahi seluruh ruang solusi.
b. Konsep CRPSO
CRPSO adalah pengembangan dari PSO yang memanfaatkan chaotic maps untuk meningkatkan eksplorasi dan konvergensi PSO. Sifat chaos memberikan variasi dinamis dalam pembaruan posisi dan kecepatan partikel sehingga menghindari konvergensi dini.
Kelebihan CRPSO:
- Eksplorasi lebih luas: Chaos menambahkan variasi acak yang lebih baik dalam proses pencarian.
- Mengatasi stagnasi: Mengurangi risiko partikel berkumpul di satu area lokal (solusi suboptimal).
- Konvergensi lebih cepat: Mempercepat pergerakan menuju solusi optimal dengan tetap menjaga eksplorasi.
2. Peran CRPSO dalam Optimasi PID-PSS
a. Apa itu PID-PSS?
- PID Controller: Proportional-Integral-Derivative (PID) adalah pengendali yang banyak digunakan untuk mengatur respons sistem dinamis.
- Power System Stabilizer (PSS): Digunakan dalam sistem tenaga listrik untuk meredam osilasi daya rendah yang terjadi akibat gangguan atau perubahan beban.
PID-PSS berfungsi untuk meningkatkan stabilitas sistem tenaga listrik dengan memberikan sinyal koreksi yang sesuai ke Automatic Voltage Regulator (AVR) guna meredam osilasi.
b. Kondisi Osilasi pada Sistem Sulselbar
Sistem Sulselbar (Sistem Kelistrikan Sulawesi Selatan dan Barat) sering mengalami tantangan seperti:
- Gangguan Transien: Perubahan beban, gangguan hubung singkat, atau perubahan konfigurasi jaringan dapat memicu osilasi daya.
- Osilasi Daya Rendah: Terjadi akibat kurangnya peredaman pada generator yang beroperasi dalam sistem interkoneksi besar.
- Ketidakstabilan Dinamis: Ketika osilasi tidak teredam dengan baik, dapat memicu ketidakstabilan sistem dan berpotensi menyebabkan pemadaman (blackout).
PSS diperlukan untuk mengatasi osilasi tersebut, namun tuning parameter PID-PSS yang tepat sangat penting agar mampu:
- Memberikan peredaman optimal terhadap osilasi daya rendah.
- Meningkatkan margin stabilitas sistem tenaga.
- Menjaga kualitas dan keandalan daya listrik di wilayah Sulselbar.

3. Kebutuhan Optimasi dengan CRPSO
Tuning parameter PID-PSS yang dilakukan secara konvensional (trial and error) memiliki beberapa kelemahan:
- Tidak efisien: Membutuhkan waktu yang lama.
- Solusi suboptimal: Parameter yang diperoleh tidak selalu memberikan performa peredaman terbaik.
- Kinerja yang buruk pada gangguan dinamis besar.
CRPSO digunakan sebagai metode optimasi untuk tuning parameter PID-PSS karena:
- Chaos meningkatkan eksplorasi ruang solusi.
- Menghasilkan parameter optimal yang meminimalkan osilasi.
- Memberikan kinerja peredaman yang lebih cepat dan efisien dibanding metode tuning konvensional.
4. Implementasi PSO untuk PSS pada Sistem Sulselbar
- Tahapan
Implementasi:
- Pemodelan Sistem Tenaga:
Pemodelan Generator

Pemodelan PSS


Menggunakan sistem Single-Machine
Infinite Bus (SMIB) atau multi-machine.

- Definisi Fungsi Objektif:


- Inisialisasi
partikel (parameter PSS).
- Evaluasi
fungsi objektif.
- Perbarui posisi dan kecepatan
partikel berdasarkan solusi terbaik.
- Iterasi hingga konvergensi.
- Pengujian
Simulasi:
- Bandingkan
performa sistem dengan dan tanpa optimasi CRPSO.
Program
clear all
clc
close all
Main;
load matlab_a; load matlab_b;
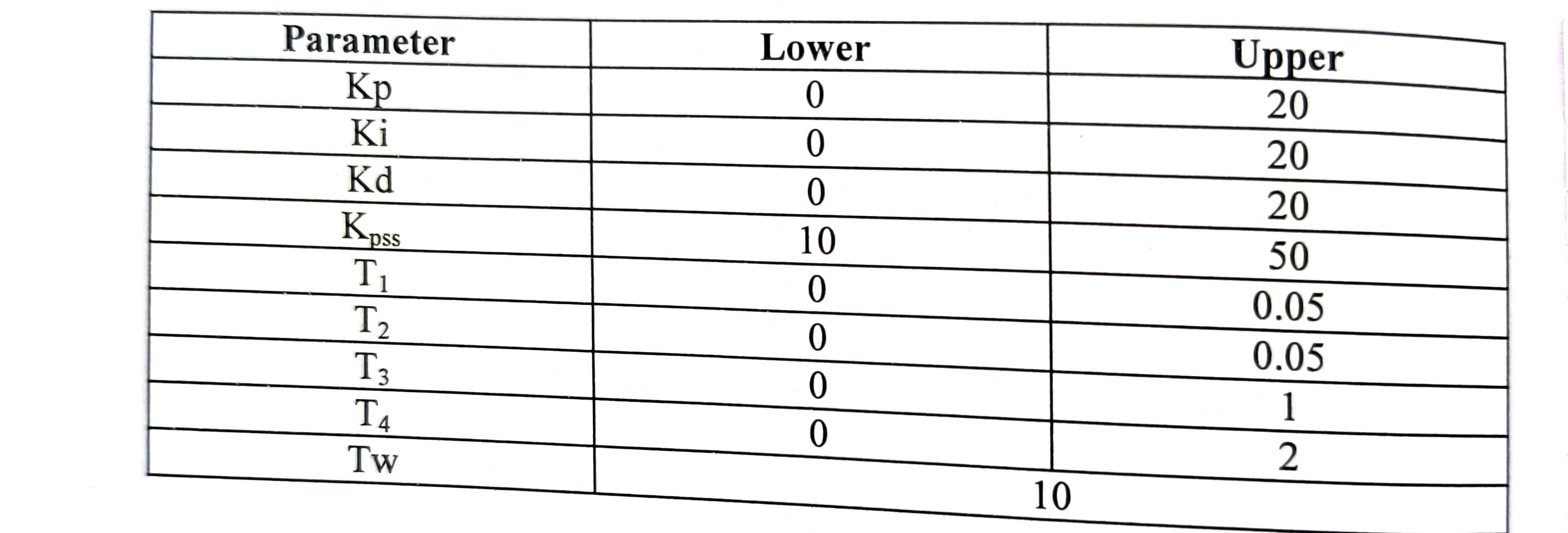
jumbird=20;
jumvar=11;
jumvarPSS=8;
maxiteration=30;
w_max=0.9;
w_min=0.4;
accel1=0.3;
accel2=0.3;
% konstanta PSO %
r1=(rand(jumvar,jumbird));
r2=(rand(jumvar,jumbird));
%
BATASAN KONSTANTA %
% PSS
bts_atas_Kstab=50;
bts_bawah_Kstab=3;
velocitymax_Kstab=0.5*(bts_atas_Kstab-bts_bawah_Kstab);
velocitybawah_Kstab=0;
% INISIALISASI POSISI AWAL %
current_position_Kstab=((bts_atas_Kstab-bts_bawah_Kstab)*rand(jumvarPSS,jumbird)+bts_bawah_Kstab);
current_position2=[current_position_Kstab];
current_position2_simpan1=current_position2;
current_position2_awal2=current_position2;
%
INISIALISASI KECEPATAN AWAL %
velocity_Kstab=((velocitymax_Kstab-velocitybawah_Kstab)*rand(jumvarPSS,jumbird)+velocitybawah_Kstab);
velocity2=[velocity_Kstab];
velocity2_simpan1=velocity2;
velocity2_awal2=velocity2;
%
INISIALISASI AWAL BEST POSITION %
local_best_position2=current_position2;
% ok<NASGU>
5. Hasil
Simulasi dan Grafik Perbandingan



Tanpa Kontrol (No PSS):
Sistem memiliki respons kecepatan terburuk dengan overshoot sebesar -0.02242 pu dan 0.005246 pu.PID Trial and Error:
Skema kontrol menggunakan PID dengan metode trial and error menghasilkan overshoot sebesar -0.02003 pu dan 0.001408 pu.PID dengan CRPSO:
Optimasi parameter PID menggunakan metode CRPSO berhasil menurunkan overshoot menjadi -0.01547 pu dan 0.0002803 pu.PID-PSS Trial and Error:
Skema PID-PSS dengan metode trial and error menghasilkan overshoot sebesar -0.01668 pu dan 0.001037 pu.PID-PSS dengan CRPSO:
Metode CRPSO menghasilkan kinerja terbaik dengan overshoot terkecil yaitu -0.01187 pu dan 0.00019 pu.
7. Kesimpulan




Tidak ada komentar:
Posting Komentar